|
|
|
|
|
清华大学研究团队:通用最优轨迹规划——基于最小作用量原理实现自动驾驶 engineering |
|
|
论文标题:
期刊:
作者:heye huang, yicong liu, jinxin liu, qisong yang, jianqiang wang, david abbink, arkady zgonnikov
发表时间: february 2024
doi:
微信链接:
文章速览
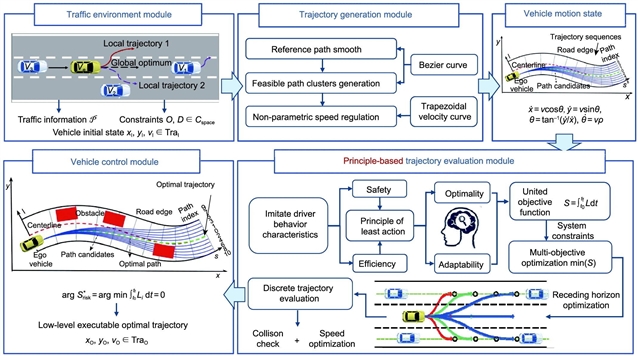
清华大学王建强研究团队在中国工程院院刊《engineering》2024年2月刊发《通用最优轨迹规划——基于最小作用量原理实现自动驾驶》一文,提出了一种通用的智能车辆最优轨迹规划(gotp)框架,能够有效地避开障碍物,引导智能车辆安全高效地完成驾驶任务。首先,文章使用五阶贝塞尔曲线生成并平滑沿道路中心线的参考路径。为了使生成的曲线的曲率尽可能连续,笛卡尔坐标被变换。在曲线坐标系中,考虑道路约束、车辆运动学约束,通过采样生成有限的多项式候选轨迹集合。并在选择最优轨迹时,模拟驾驶人驾驶行为,总结驾驶人”趋利避害”操纵特性,提出了基于最小作用量原理的统一自适应目标函数。最后,文章基于滚动时域优化的思想,输出最优轨迹规划框架,能够协同规划过程动态多性能目标,并选择满足完备性、最优性和智能化的轨迹。大量的仿真和实验结果证明了该框架的可行性和有效性,能有效避开动态和静态障碍物,适用于多源交互交通参与者的各种场景。同时,与驾驶人操纵轨迹对比,所提出的框架能够满足实时安全规划需求。
关键词:
自动驾驶 ; 轨迹规划 ; 多性能目标 ; 最小作用量原理
原文链接:

扫二维码|查看原文
推荐阅读
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负米乐app官网下载的版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。