|
|
|
|
|
同济大学研究团队:基于安全合理探索与利用的自动驾驶自进化决策规划engineering |
|
|
论文标题:
期刊:
作者:袁康, 黄岩军, 杨硕, 周泽纬, 王宇雷, 曹东璞, 陈虹
发表时间: february 2024
doi:
微信链接:
文章速览
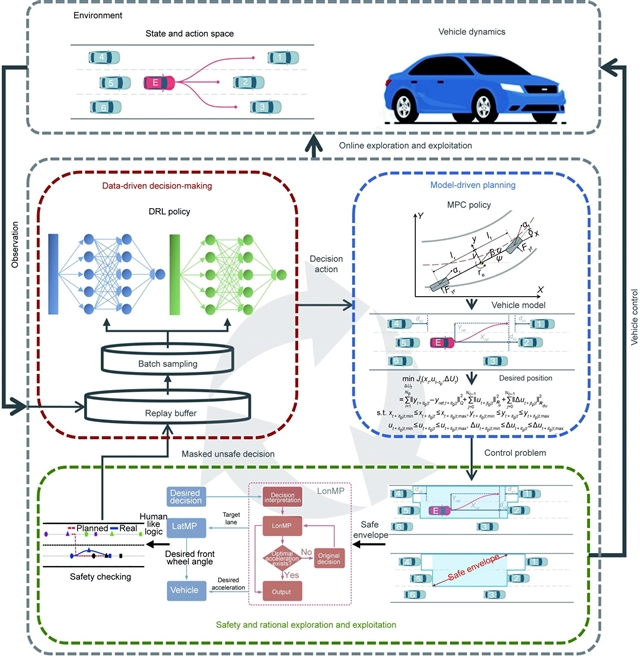
同济大学黄岩军、陈虹研究团队在中国工程院院刊《engineering》2024年2月刊发《基于安全合理探索与利用的自动驾驶自进化决策规划》一文,指出行为决策和运动规划对于自动驾驶的安全性至关重要。文章提出了一种数据和模型混合驱动的自动驾驶在线决策规划自进化框架。首先,开发了一个基于深度强化学习(drl)的数据驱动决策模块以尽可能追求合理的驾驶性能。然后,采用模型预测控制(mpc)同时执行纵向和横向运动规划任务,并根据车辆的物理极限定义了多个约束,以满足驾驶任务要求。最后,提出了自动驾驶自进化的安全性和合理性准则。文章建立了安全运动包络并与所提出的合理探索与利用机制集成,规避了不安全的动作,以此过滤不合理的经验,从而为drl智能体收集高质量的训练数据。在高保真车辆模型和matlab/simulink联合仿真环境下进行了算法验证,结果表明所提出的在线进化框架能够实现更安全、合理、高效的驾驶行为。
关键词:
自动驾驶 ; 行为决策 ; 运动规划 ; 深度强化学习 ; 模型预测控制
原文链接:

扫二维码|查看原文
推荐阅读
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负米乐app官网下载的版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。